

Ijraset Journal For Research in Applied Science and Engineering Technology
Robotic Arm using ESP32 and Smartphone
Authors: Rupali Gavaraskar, Nagnath P. Kotwal, Aditya K. Kshirsagar, Shruti K. Korpade, Aditya A. Kshirsagar
DOI Link: https://doi.org/10.22214/ijraset.2023.56093
Certificate: View Certificate
Abstract
In this paper our main purpose is to design a robotic arm controlled using Web Socket. The field of robotics is a very rapidly growing field and that is why we are designing a robotic arm that will help us in our basic day-to-day chores. The arm will be controlled wirelessly with our mobile. WebSocket will act as a communication (control) medium between the arm and mobile.
Introduction
I. INTRODUCTION
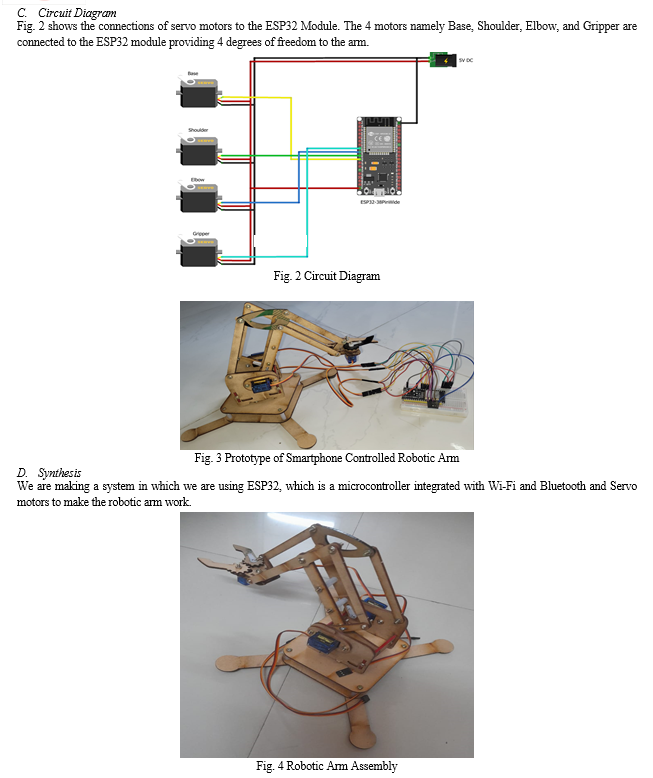
The primary goal of our project is to control our robotic arm wirelessly through mobile. This system allows using the arm in risk-related environments such as radioactive or chemical labs, and industries. The robotic arm can perform straightforward pick and place operations and has four degrees of freedom. This will automate the risky work up to a certain extent.
II. LITERATURE REVIEW
Aishwarya N. Reganti, Surekha Ananthapalli, B. Chiranjith Viswa Mohan, R. Mounica and V.K. Mitta1 [1] The robotic arm in this project has four degrees of freedom (D.O.F.) and can be wirelessly operated utilizing four different control methods, including voice control, smartphone tilt control, remote control, and hand gesture control. The QCRA has some restrictions and requirements, like a maximum payload of 420 grammes and a Bluetooth range that can go up to 11 meters. The results of the performance evaluation are favorable, and future uses are discussed. The effectiveness of an interactive Quad Control Robotic Arm (QCRA) that can aid in picking up and putting objects at remote locations is examined in this research. The effectiveness of the Hand-Gesture Recognition System is evaluated by completing several time latencies calculations at various operational ranges and distances for the communication networks employed.
Shotaro Gushi, Hiroki Higa, Hideyuki Uehara, and Takashi Soken [2] A movable robotic arm for patients with severe disabilities is reported in this study. An internet camera, computer, and display device make up its user interface. The experiment's findings demonstrated that the robotic arm system could successfully transfer more than 82% of the water and soup from the soup bowl. To reduce the amount of leftover soup in the soup bowl, tilting the bowl should be considered and the eat-up signal upgraded. Future research will require more trials with severely disabled individuals.
Kv?toslav Belda, Oliver Rovný [3] The design of model predictive control (MPC), a sophisticated local motion control technique for articulated robot arms used in manipulation operations, is discussed in the study. It introduces kinematics and dynamics mathematical models and explains MPC design. The suggested remedy is energy-efficient centralized control that recognizes the motion of the robot arm as a challenging task. Experimental verification and modelling of the movable underframe will be the main goals of subsequent study, and the generated model will be incorporated into the overall control target.
Mohannad Farag, Abdul Nasir Abd Ghafar, Mohammed Hayyan Alsibai [4] The goal of this research was to increase the application of computer vision to robotic positioning and grasping. To find circular holes in an input image, a SCARA robot was employed as a hardware platform equipped with a Chameleon3 USB3 camera. That circular item was located using seven edge detection methods, and the best results were achieved by Log, Zero-cross, and Canny. After employing camera calibration to remove lens distortion, the position of the observed object was determined using world unit coordinates. With an average positioning error of (0.314,0.155 mm), the robot was correctly positioned at the detected spot.
Laith Sawaqed, Ahmad I. Al-Ali, Khaled S. Hatamleh, Mohammad A. Jaradat [5] This work introduces a novel mobile robot manipulation system with numerous features. It is made up of a movable platform and an adjustable robotic arm with seven degrees of freedom (DOF). A hybrid legged/wheel platform, a 7-DOF reconfigurable robotic arm, and a modularly built actuator and RCM make up this system. The robot's capabilities are tested using several tests, including the reconfigurable experiment, the repeat positioning accuracy experiment, and the load experiment. There are still certain shortcomings, though, such the slow locomotion and the simplistic control system.
Zexin Huang, Fenglei Li, Lin Xu [6] This article suggests a method for robotic arms in a physical environment that is realistic, based on Gazebo. Parallel-Axis The path planning algorithm, joint controllers, and the theorem are crucial components of the system utilized to determine the MOI of the links. The job architecture is organized using ROS. Future research will concentrate on how to train a decision-making system to select the best algorithm.
Adam Zaheer, Durga Sundaram, and Kiran George [7] The creation of a trainable robotic arm that can help the physically disadvantaged is the aim of this article. The two main criteria that were looked at were how quickly and precisely the robotic arm could repeat the task that it had previously practiced. The results of test one demonstrated that training activities requiring quick movements are associated with the largest yield of error. The outcomes of test two demonstrated that, despite some errors in the block positioning, the robotic arm could complete the tasks. Both the robotic arm's software and hardware components might be held responsible for the inaccuracy.
Peng Kang, Liang Han, Wenfu Xu, Peng Wang, Guo Yang [8] In this study, a revolutionary multi-functional mobile robot manipulation system design is proposed. It consists of a mobile platform and a seven-DOF robotic arm that may be modified depending on the task by changing the manipulator's end effector. The control system's hardware and software are also introduced, and several experiments are used to validate the system's performance. Still, there are several shortcomings, such as a slow locomotion rate and a primitive control system.
III. METHODOLOGY
A. Method
The hardware assembly of the robotic arm is done. The software includes WebSocket connections which has major libraries such as ESPAsyncWebServer Library, AsyncTCP Library, and ESP32 Servo Library.
- ESPAsyncWebServer Library: It offers asynchronous handling of HTTP requests, enabling you to create web applications that are responsive and effective.
- Async TCP Library: A networking library for ESP8266 and ESP32 microcontroller boards is called the AsyncTCP library. It offers asynchronous TCP client and server features, enabling you to create TCP connections and engage in asynchronous network communication.
- ESP32 Servo Library: The ESP32 servo library provides an intuitive user interface for precise and fluid servo motor motions, simplifying the process of controlling servo motors with the ESP32 microcontroller.
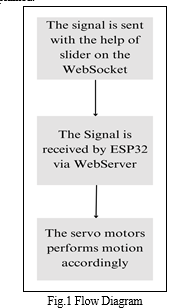
B. Flowchart
In Fig. 1, the working flow of the project is explained.

V. FUTURE SCOPE
Robots will become our daily companions as well as our acolytes in the future. A Zigbee module will be incorporated in the future so that the robot can be controlled remotely. Additionally, it may be controlled remotely using Ethernet connectivity and a camera to show feedback. Additionally, the robot can be utilised for a variety of tasks like handling pyrotechnics and defusing bombs in situations where human lives are in danger. A gesture-controlled robotic arm is a low-cost solution to issues encountered in the fireworks industry.
We can also use mobile-controlled robotic arm in separating trash from its environment. Waste management is a significant problem in India. So, in this regard, our robotic Arm will be of assistance. Separating dry and wet trash, as well as diverse waste kinds including paper, plastic, food, or green debris, and electronic objects that fall under the magnetic waste category, will be simpler.
VI. ACKNOWLEDGMENT
We would like to convey our sincere appreciation to everyone who helped make this endeavour successful. To begin with, we want to express our gratitude to the Vishwakarma Institute of Technology in Pune. . Additionally, we would like to thank Prof. Rupali Gavaraskar Madam for her assistance and motivation during this endeavour. Furthermore, it would not have been possible to finish the job within the specified time frame without the helpful contributions of everyone involved.
Conclusion
The parts for the robotic leg were priced and easily accessible. The model was fully constructed, and the functionality was tested. Basic operations such as pick and place have been implemented in the robot. Servo Motor assists with robotic movements. The WebSocket makes it possible to establish communication with the robotic arm. Overall, the aimed working of the project is achieved and the additional functionality of recording the movements and repeating them works quite well.
References
[1] A. N. Reganti, S. Ananthapalli, B. C. V. Mohan, R. Mounica, and V. K. Mittal, \"Mobile Quad-Controlled wireless Robotic Arm,\" 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 2016, pp. 1-5, doi: 10.1109/ICPEICES.2016.7853105. [2] S. Gushi, H. Higa, H. Uehara and T. Soken, \"A mobile robotic arm for people with severe disabilities: Evaluation of scooping foods,\" 2017 International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Okinawa, Japan, 2017, pp. 152-153, doi: 10.1109/ICIIBMS.2017.8279740. [3] K. Belda and O. Rovný, \"Predictive control of 5 DOF robot arm of autonomous mobile robotic system motion control employing mathematical model of the robot arm dynamics,\" 2017 21st International Conference on Process Control (PC), Strbske Pleso, Slovakia, 2017, pp. 339-344, doi: 10.1109/PC.2017.7976237. [4] M. Farag, A. N. Abd Ghafar and M. H. Alsibai, \"Grasping and Positioning Tasks for Selective Compliant Articulated Robotic Arm Using Object Detection and Localization: Preliminary Results,\" 2019 6th International Conference on Electrical and Electronics Engineering (ICEEE), Istanbul, Turkey, 2019, pp. 284-288, doi: 10.1109/ICEEE2019.2019.00061. [5] L. Sawaqed, A. I. Al-Ali, K. S. Hatamleh and M. A. Jaradat, \"Modeling and simulation of a moving robotic arm mounted on wheelchair,\" 2017 7th International Conference on Modeling, Simulation, and Applied Optimization (ICMSAO), Sharjah, United Arab Emirates, 2017, pp. 1-5, doi: 10.1109/ICMSAO.2017.7934876. [6] Z. Huang, F. Li, and L. Xu, \"Modeling and Simulation of 6 DOF Robotic Arm Based on Gazebo,\" 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 2020, pp. 319-323, doi: 10.1109/ICCAR49639.2020.9107989. [7] A. Zaheer, D. Sundaram and K. George, \"Trainable Robotic Arm for Disability Assistance,\" 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 2018, pp. 700-704, doi: 10.1109/UEMCON.2018.8796741. [8] P. Kang, L. Han, W. Xu, P. Wang, and G. Yang, \"Mobile Robot Manipulation System with a Reconfigurable Robotic Arm: Design and Experiment,\" 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 2019, pp. 2378-2383, doi: 10.1109/ROBIO49542.2019.8961389.
Copyright
Copyright © 2023 Rupali Gavaraskar, Nagnath P. Kotwal, Aditya K. Kshirsagar, Shruti K. Korpade, Aditya A. Kshirsagar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56093
Publish Date : 2023-10-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online